AUTOSAR란?
AUTOSAR( AUTomotive Open System ARchitecture)
OSEK에서 더 발전된 표준협의체로 표준화된 플랫폼 및 아키텍처를 통해 비용 절감과 품질 향상을 목표로 한다.
"Cooperate on standards, compete on implementation"이라는 기준 아래 형성된 글로벌 파트너쉽이다.

운영 조직
운영 조직은 참여 정도에 따라 4개 영역으로 구성된다.
Core Partners : 조직 및 행정 관리
Premium Partners : Working group의 선도 및 개선
Development Partners : 전문 지식 기여
Associate Partners : AUTOSR 표준 사용자

AUTOSAR 개발 과정
Configure System : 시스템 설정 단계로 컴포넌트의 구성/연결 등을 정의한다.
Implement Component : 구성한 컴포넌트에 대한 코드 구현한다.
Extract ECU-Specific Information : 시스템 구성 정보로부터 특정 제어기 소프트웨어를 구현하기 위한 정보를 추출한다.
Configure ECU : 제어기 관련 설정을 진행한다.
Generate Executable : 제어기에서 동작하는 실행 파일을 생성한다.
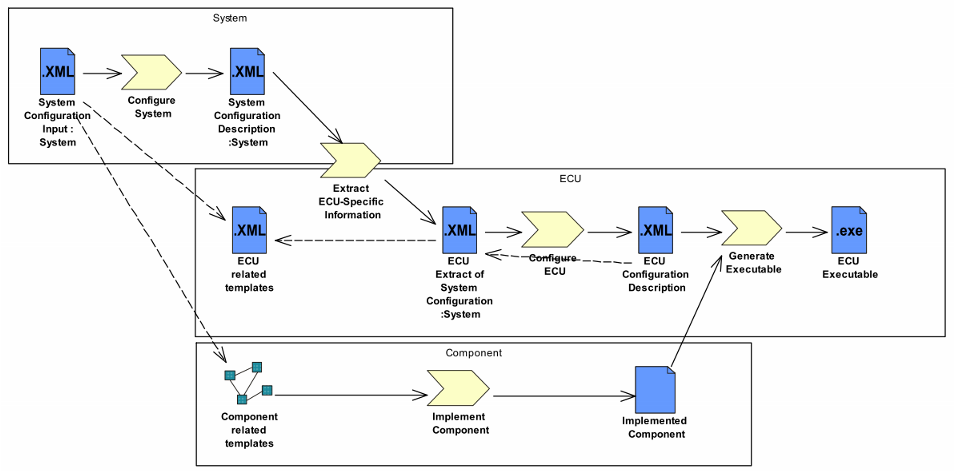
AUTOSAR 개발 과정은 Top-down 방식으로 개발된다.
시스템 설계자는 VFB(Virtual Functional Bus) 상에서 SW-C를 설계하며, SW-C간 데이터 이동은 Port와 Interface로 정의한다.
Configure System 단계에서 SW-C를 특정 ECU에 할당하고 ECU Extract를 통해 개별 ECU에 설계 정보를 전달한다.
ECU는 SW-C간 또는 SW-C와 BSW간 구체적인 인터페이스를 RTE(Run-Time Environment)를 통해 구현한다.

AUTOSAR 아키텍처 구조
계층화된 구조 사용으로 업체별 개발 분담이 가능하다. (Application, BSW, MCAL)
HW와 독립적인 구조로 SW Application 재사용이 가능하다.
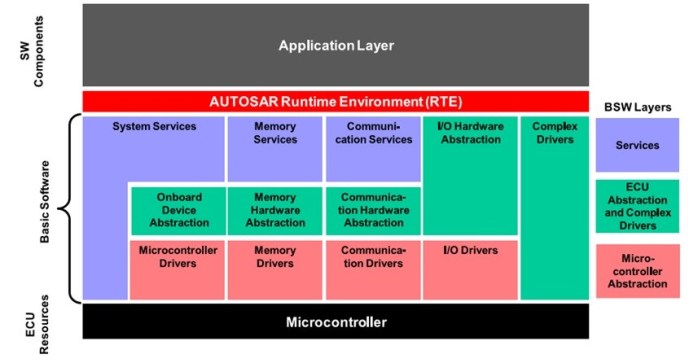
Application Layer : 하드웨어에 독립적인 응용 프로그램 S/W를 정의, SWC 종류는 기능에 따라 Application, Actuator, Sensor 등으로 구별, SWC간 통신 및 SWC-BSW 사이 통신은 RTE를 이용.
RTE(RunTime Environment) : VFB로 모델화된 통신 구조가 실제 로컬 연결이나 네트워크 통신으로 구현된 환경, ECU에 독립적인 Interface Mapping을 SWC에 제공. RTE에 정의된 표준 인터페이스만을 이용하여 SWC 개발 가능.
BSW(Basic Software)
Service Layer : 시스템 구동 및 다른 BSW 모듈 제어를 위한 관리 서비스 제공
ECU Abstraction Layer : MCAL 드라이버들을 상위 계층에 Interface하는 추상화 계층. 외부 장치들을 사용하기 위한 드라이버 포함
Microcontroller Abstraction Layer : MCU 내부 장치를 이용하기 위한 드라이버들로 구성.
Complex Drivers : AUTOSAR 표준에 정의되지 않은 기능 구현을 위한 계층.

AUTOSAR Interface : 사용자 설정에 따라 생성되는 API ex)Rte_Read_<port>_<DataElement>, Rte_Call_<port>_<operation>
Standardized AUTOSAR Interface : AUTOSAR Interface와 동일한 API 구조를 갖지만 표준에 정의된 Interface를 사용.
Standarized Interface : 표준 Interface와 BSW 간 Data를 주고 받거나 동작을 실행하기 위한 API. ex)Com_SendSignal(id, data)
'기술 > 개발 지식' 카테고리의 다른 글
| AUTOSAR - RTE (0) | 2020.03.16 |
|---|---|
| AUTOSAR - OS (0) | 2020.03.16 |
| Medini Analyze를 활용한 기능안전(ISO26262) 세미나 - Part 4~6 (0) | 2020.02.26 |
| Medini Analyze를 활용한 기능안전(ISO26262) 세미나 - Part 3 (0) | 2020.02.25 |
| Medini Analyze를 활용한 기능안전(ISO26262) 세미나 - 개요 (0) | 2020.02.25 |



